Nouvelles de l'entreprise
Comment contrôler la vitesse et le couple de la machine d'essai universelle électronique
Temps de libération:2018-11-23 source:Jinan Hengsi Shanda Instrument Co., Ltd. Parcourir:
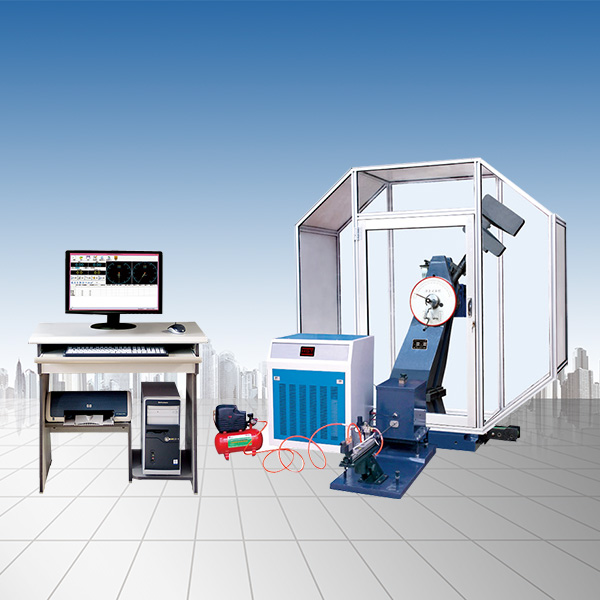
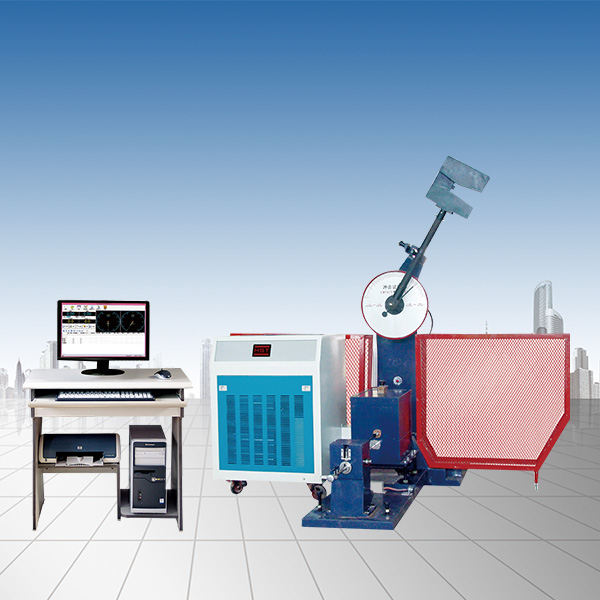
Machine de test universelle électroniqueLe contrôle de la vitesse et le contrôle du couple des machines d'essai universels électroniques sont contrôlés par la quantité analogique. La commande de position de la machine d'essai universelle électronique est contrôlée par la génération d'impulsions. Quelle méthode de contrôle spécifique doit être choisie en fonction des exigences du client et quels types de fonctions de mouvement doivent être remplies.
Si vous n'avez aucune exigence pour la vitesse et la position du testeur universel électronique du moteur, il vous suffit de sortir un couple de testeur universel électronique constant, bien sûr, utilisez le mode de couple électronique du testeur universel.
S'il existe certaines exigences de précision pour la position du testeur universel électronique et la vitesse du testeur universel électronique, mais ne sont pas très préoccupés par le couple du testeur universel électronique en temps réel, il n'est pas pratique d'utiliser le mode de position de testeur universel électronique de la vitesse du testeur universel électronique du testeur universel électronique. Si le contrôleur supérieur a une meilleure fonction de contrôle en boucle fermée, l'effet de contrôle de vitesse de l'utilisation de la machine de test universelle électronique sera meilleure. Si les exigences elles-mêmes ne sont pas très élevées ou qu'il n'y a essentiellement pas d'exigences en temps réel, la méthode de contrôle de position de la machine de test universelle électronique n'a pas d'exigences très élevées pour le contrôleur supérieur.
À en juger par la vitesse de la réponse du conducteur du servo, la quantité de calcul du mode de couple de la machine d'essai universelle électronique est petite et le conducteur répond rapidement au signal de contrôle; La quantité de calcul du mode de position de la machine de test universelle électronique est lente pour répondre au signal de contrôle.
Lorsqu'il existe des exigences relativement élevées pour les performances dynamiques en mouvement, le moteur doit être ajusté en temps réel. Ensuite, si le contrôleur lui-même a une vitesse lente dans le calcul de la machine d'essai universelle électronique (telle que PLC ou contrôleur de mouvement bas de gamme), le contrôle de position électronique de la machine d'essai universel est utilisé. Si le contrôleur calcule la machine d'essai universelle électronique à une vitesse plus rapide, vous pouvez utiliser la méthode électronique de la vitesse de la machine de test universelle pour déplacer l'anneau de position de la machine d'essai universel électronique du conducteur vers le contrôleur pour réduire la charge de travail du conducteur et améliorer l'efficacité (comme la plupart des contrôleurs de mouvement à mi-hauteur); S'il y a un meilleur contrôleur supérieur, vous pouvez également utiliser la méthode électronique du couple de la machine de test universelle pour déplacer l'anneau de vitesse électronique de la machine de test universelle du conducteur. Il s'agit généralement d'un contrôleur dédié haut de gamme pour ce faire, et il n'est pas nécessaire d'utiliser un servomoteur pour le moment.
De manière générale, que le contrôle du lecteur soit bon ou non, chaque fabricant dit qu'il le fait lui-même, mais maintenant il existe une méthode de comparaison plus intuitive appelée bande passante de réponse. Lorsque le contrôle du couple du testeur universel électronique ou le contrôle de vitesse du testeur universel électronique est utilisé pour lui donner un signal d'onde carré à travers le générateur d'impulsions, ce qui fait tourner et inverser en continu le moteur et augmenter en continu la fréquence. L'oscilloscope montre un signal de balayage. Lorsque le sommet de l'enveloppe atteint 70,7% de la valeur, cela signifie que l'étape a été perdue. La fréquence à ce moment peut montrer qui est génial. La boucle de courant générale peut atteindre plus de 1000 Hz, tandis que la boucle de vitesse du testeur universel électronique ne peut atteindre que quelques douzaines de Hertz.
Pour le mettre de manière plus professionnelle:
1. Contrôle du couple du testeur universel électronique: La méthode de contrôle du couple du testeur universel électronique est de régler le couple de l'arbre du moteur sur la sortie extérieure par l'entrée de la quantité analogique externe ou l'affectation de l'adresse directe. Plus précisément, par exemple, si le 10V correspond à 5 nm, la sortie de l'arbre du moteur est de 2,5 nm lorsque la quantité analogique externe est définie sur 5V: Si la charge de l'arbre du moteur est inférieure à 2,5 nm, le moteur tourne vers l'avant, le moteur ne tourne pas lorsque la charge externe est égale à 2,5 nm, et le moteur s'incline lorsqu'il est supérieur à 2,5NM (généralement généré sous la gravité). La taille du couple réglé peut être modifiée en modifiant instantanément le réglage de la quantité analogique, ou il peut être modifié par la méthode de communication pour modifier la valeur de l'adresse correspondante.
L'application est principalement dans les dispositifs d'enroulement et de détente qui ont des exigences strictes sur la force du matériau, telles que les dispositifs rayonnants ou l'équipement à fibre optique. Le réglage du couple de la machine d'essai universelle électronique doit être modifié à tout moment en fonction du changement du rayon d'enroulement pour s'assurer que la force du matériau ne changera pas avec le changement du rayon d'enroulement.
2. Contrôle de position de la machine d'essai universelle électronique: Le mode de contrôle de position de la machine à test universel électronique détermine généralement la vitesse de rotation de la machine d'essai universelle électronique à travers la fréquence des impulsions d'entrée externes et détermine l'angle de rotation à travers le nombre d'impulsions. Certains servos peuvent attribuer directement la vitesse et le déplacement de la machine d'essai universelle électronique par la communication. Étant donné que le mode de position du testeur universel électronique peut contrôler strictement la vitesse du testeur universel électronique et la position du testeur universel électronique, il est généralement utilisé dans les dispositifs de positionnement. Des zones d'application telles que les machines CNC, les machines d'impression, etc.
3. Mode de vitesse de la machine de test universelle électronique: La vitesse de la machine d'essai universelle électronique rotative peut être contrôlée par l'entrée de la quantité analogique ou la fréquence des impulsions. Le mode de vitesse électronique de la machine de test universel peut également être positionné lorsque le contrôle extérieur du PID avec le dispositif de contrôle supérieur est contrôlé, mais le signal de position du moteur ou le signal de position de la charge directe de la machine d'essai universelle électronique doit être donné à la position supérieure pour le fonctionnement. Le mode de position du testeur universel électronique prend également en charge le cycle extérieur de charge directe pour détecter le signal de position du testeur universel électronique. À l'heure actuelle, l'encodeur à l'extrémité de l'arbre du moteur ne détecte que la vitesse du moteur, et le signal de position du testeur universel électronique est fourni par le dispositif de détection à l'extrémité directe de la charge. Cet avantage est qu'il peut réduire les erreurs pendant le processus de transmission intermédiaire et augmenter la précision de positionnement de l'ensemble du système.
4. Parlons de 3 anneaux. Le servo est généralement contrôlé par trois anneaux. Les trois anneaux soi-disant sont trois systèmes de réglage de rétroaction négative en boucle fermée. L'anneau PID à l'intérieur est l'anneau actuel, qui est complètement réalisé à l'intérieur du conducteur de servo. Le courant de sortie du conducteur à chaque phase du moteur est détecté via le dispositif Hall, et le courant de rétroaction négatif est défini pour le réglage du PID, de sorte que le courant de sortie est aussi proche que possible du courant défini. L'anneau actuel contrôle le couple de la machine d'essai universelle électronique du moteur, de sorte que le calcul du conducteur est petit et la réponse dynamique est rapide en mode couple de la machine de test universelle électronique.
Le deuxième anneau est l'anneau de vitesse de la machine de test universelle électronique. Le réglage de la PID de rétroaction négative est effectué par le signal détecté du codeur de moteur. La sortie PID dans son anneau est directement le réglage de l'anneau actuel. Par conséquent, l'anneau de vitesse de la machine d'essai universelle électronique comprend l'anneau de vitesse et l'anneau actuel. En d'autres termes, tout mode doit utiliser l'anneau actuel. L'anneau actuel est la base du contrôle. Bien que la vitesse et la position de la machine d'essai universelle électronique soient contrôlées, le système contrôle en fait le courant (couple de la machine d'essai universelle électronique) pour obtenir le contrôle correspondant de la vitesse de la machine d'essai universelle électronique et la position de la machine de test universelle électronique.
Le troisième anneau est l'anneau de position de la machine d'essai universelle électronique. C'est l'anneau extérieur. Il peut être construit entre le conducteur et le codeur de moteur ou entre le contrôleur externe et l'encodeur de moteur ou la charge finale. Il doit être déterminé en fonction de la situation réelle. Étant donné que la sortie interne de l'anneau de commande de position de la machine d'essai universelle électronique est le réglage de l'anneau de vitesse de la machine de test universelle électronique, le système effectue les 3 anneaux en mode de commande de position de la machine de test universelle électronique. À l'heure actuelle, le volume de calcul du système et la réponse dynamique de la machine de test universelle électronique sont également lents.
Produits recommandésPRODUCTS